Es ist wieder Winter. Im Sommer kommt man leider nicht dazu kleinere Projekte durchzuführen.
Conrad Elektronik hatte im letzten Jahr „Das Internet der Dinge“ als Adventskalender. Ein Kollege hat mich erst kurz vor Weihnachten darauf aufmerksam gemacht und mir eine Packung mitgebracht.
In der Packung befand sich hinter dem ersten Türchen ein Arduino NanoESP. Dann ein Steckbrett und immer so weiter. Jeden Tag ein kleiner Versuch dazu und alles super beschrieben. iPhone mit dem Arduino über das Internet und Blynk verbinden, LED mit iPhone ein und ausschalten. 24 Versuche um die Zeit bis Weihnachten zu verkürzen.
Die Programmierumgebung für den Arduino ist auch sehr einfach gestaltet. Kann eigentlich jeder mit etwas Internetrecherche nachvollziehen.
Als ich das dann ausprobiert habe, viel mir mein Rasenroboter-Projekt wieder ein und beschloss, hier kann „Mann“ jetzt mal weitermachen. Also habe ich mal alles rausgesucht, was in der Raspberry-Ablage verstaubt. GPS, Kompass, Display 16×2, Ultraschall und so weiter hatte ich schon vor längerer Zeit aus China bestellt. Jetzt habe ich mal alles an den Arduino angeschlossen und getestet.
Schon werden die Gedankenblasen wieder grösser. Da der Arduino auch analoge Eingänge hat, kann der auch gleich die Batterien überwachen. Den Raspberry als Master und Arduinos als Navigator und PowerManager über I2C verbunden? Mal sehen wie lang der Winter wird?
Der Winter ist lange vorbei. Die Zeit zum basteln ist voll im 3D Drucker-Projekt verschwunden. Jetzt, da der 3D Drucker läuft, will ich mich aber mal wieder um das Projekt Rasenroboter kümmern. Ich habe mir jetzt überlegt, einen Rasenroboter mit Ketten zu fertigen. Haben nicht so viele. So ein Ardumower fährt auf seinen Rädern durch die Gegend und muss an jedem „Anschlag“ wenden. Ich stelle mir ein symmetrisches Gefährt vor, das einfach nur hin- und herfährt ohne zu wenden. Ketten hören sich erst einmal blöd an, die Auflagekraft pro Quadratzentimeter ist aber sicherlich geringer als wenn acht bis neun Kilo auf drei Rädern stehen. Außerdem, gibt es schon einen Rasenroboter, der den Rasen auch lüftet? Zwei, drei Bohrer, die in ungleichmäßigen Abständen mal ein Loch in die Grasnarbe bohren. Na mal sehen. Jetzt erst einmal frisch ans Werk. Zuerst einmal Kettenglieder produzieren. Dazu nehmen wir natürlich den 3D Drucker.
Die Kettenglieder werden dann ein wenig gebohrt und mit Stahlstiften zu einer Kette zusammengefasst.
Zum Antrieb der Kunststoffkette brauchen wir ein Antriebsrad. Das Kettenglied habe ich von www.thingiverse.com Das Antriebsrad habe ich mit Autodesk Fusion 360 konstruiert.
Die Kette ist noch nicht gespannt, läuft aber schon recht gut.
OK – Blödsinn.
Ich baue jetzt doch erst einmal einen Ardumower mit Rädern und verlegter Sensor-Schleife. Alles andere sieht nach mächtig Aufwand aus. Über GPS die ganzen Bögen, Kurven abfragen ist eine mächtige Herausforderung. So einen Ardumower haben schon mehrere Leute erfolgreich zum mähen gebracht. GPS kann dann zur Unterstützung verwendet werden. Ich glaube, so komme ich am schnellsten zum Ziel. Das 3D-Druckerprojekt habe ich am Anfang auch ein paar Mal über den Haufen geworfen. Jetzt bin ich sehr zufrieden mit dem Drucker und auch hier beim Rasenroboter werden viele Teile auf dem selbst gebauten Drucker hergestellt. Aber nur so kann man Erfahrungen sammeln und dabei etwas lernen.
Der „Ardumower“ entsteht.
 Als erstes einen passenden Rahmen. Dazu verwende ich, mal wieder, alte Gehäuse von ausgemusterten Apple-Computern. Das G5- und Mac Pro-Gehäuse ist für diese Zwecke am besten geeignet. Räder erst einmal eine Billigvariante aus dem Baumarkt. Falls die mir dann den Rasen versemmeln, kann man noch auf eine dickere Gummibereifung umsteigen. Ich werde das Ding mit 12 Volt betreiben.
Als erstes einen passenden Rahmen. Dazu verwende ich, mal wieder, alte Gehäuse von ausgemusterten Apple-Computern. Das G5- und Mac Pro-Gehäuse ist für diese Zwecke am besten geeignet. Räder erst einmal eine Billigvariante aus dem Baumarkt. Falls die mir dann den Rasen versemmeln, kann man noch auf eine dickere Gummibereifung umsteigen. Ich werde das Ding mit 12 Volt betreiben.  Einen 12 Volt Motor habe ich noch im Fundus. Mal sehen, ob der die Grasnarbe flach halten kann. Zur Stromversorgung nehme ich einen 12 Volt, 12 Ah AKKU. Hier habe ich auch mehrere auf Lager. Man könnte über ein Akku-Wechselsystem nachdenken.
Einen 12 Volt Motor habe ich noch im Fundus. Mal sehen, ob der die Grasnarbe flach halten kann. Zur Stromversorgung nehme ich einen 12 Volt, 12 Ah AKKU. Hier habe ich auch mehrere auf Lager. Man könnte über ein Akku-Wechselsystem nachdenken. 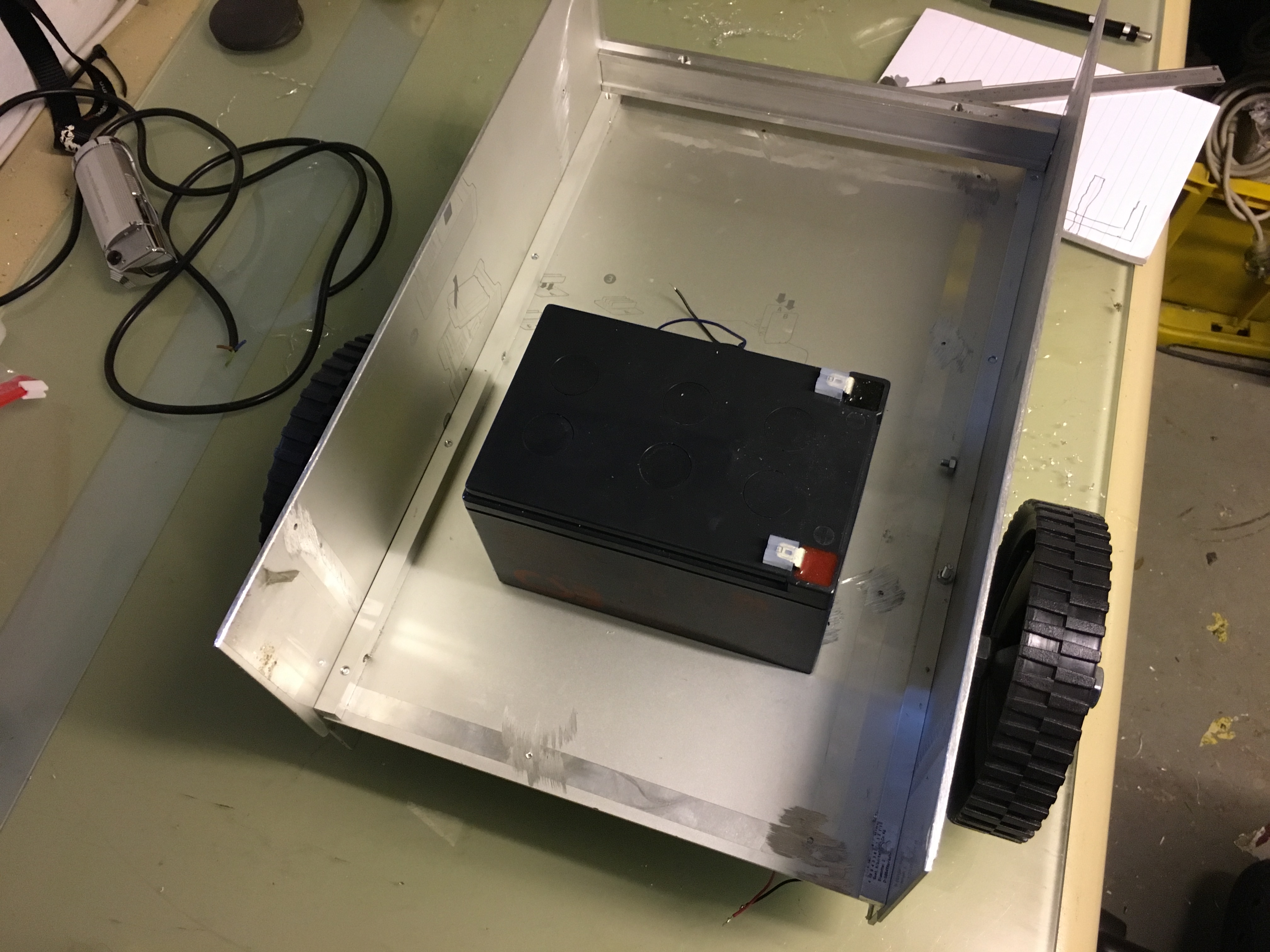 Nicht mit dem Rasenroboter in die Ladestation fahren, sondern mit einem Roboterarm den Akku wechseln. Das wäre ja auch eine praktikable Lösung für Elektroautos. Alle den gleichen AKKU, dann einfach an die Tanke, neuen Akku und weiter. Aber alle den gleichen AKKU? Dann müssten alle Fahrzeughersteller zusammenarbeiten. Zum Antrieb kommen zwei Getriebemotorn Turbine DC 12V 2-100RPM zum Einsatz. Die Teile machen 100 kraftvolle Umdrehungen die Minute. Bei 14 cm Raddurchmesser und 100 Umdrehungen bewegt sich der Rasenmäher mit 43,98 m/Minute. Das ist schon schnell.
Nicht mit dem Rasenroboter in die Ladestation fahren, sondern mit einem Roboterarm den Akku wechseln. Das wäre ja auch eine praktikable Lösung für Elektroautos. Alle den gleichen AKKU, dann einfach an die Tanke, neuen Akku und weiter. Aber alle den gleichen AKKU? Dann müssten alle Fahrzeughersteller zusammenarbeiten. Zum Antrieb kommen zwei Getriebemotorn Turbine DC 12V 2-100RPM zum Einsatz. Die Teile machen 100 kraftvolle Umdrehungen die Minute. Bei 14 cm Raddurchmesser und 100 Umdrehungen bewegt sich der Rasenmäher mit 43,98 m/Minute. Das ist schon schnell. 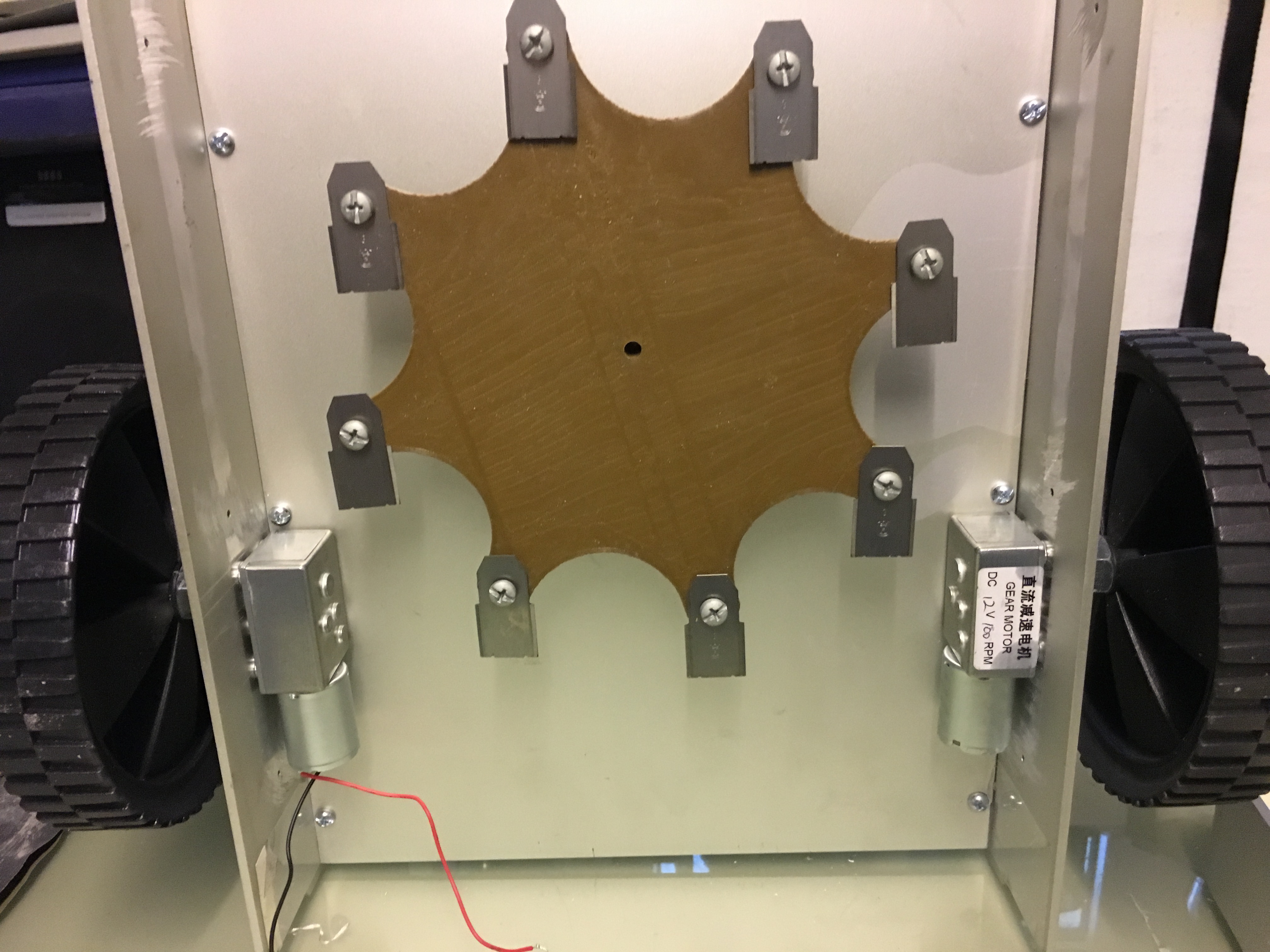 Damit bei der Geschwindigkeit alles kurz und klein gehäckselt wird, habe ich ein Scherblatt mit acht Klingenhaltern mit Fusion 360 konstruiert und mit dem 3D Drucker hergestellt. Zum Einsatz kommen jetzt im ersten einmal Klingen von Gardena. Die kosten zwar 17,-€ es sind aber gleich passende Schrauben dabei.
Damit bei der Geschwindigkeit alles kurz und klein gehäckselt wird, habe ich ein Scherblatt mit acht Klingenhaltern mit Fusion 360 konstruiert und mit dem 3D Drucker hergestellt. Zum Einsatz kommen jetzt im ersten einmal Klingen von Gardena. Die kosten zwar 17,-€ es sind aber gleich passende Schrauben dabei.
 Jeder Roboter braucht einen Namen. Mein Rasenroboter wird „Dewey“ heißen. Wem das kein Begriff sein sollte, Dewey ist der letzte überlebende Roboter der Valley Forge im Film „Lautlos im Weltraum“ (1972). Er wird mit der letzten Kuppel in den Weltraum abgestossen und pflegt die letzten Pflanzen der Erde. Endzeitstimmung, passt im Moment irgendwie zu meinem Rasen. Hier geht es zum Film.
Jeder Roboter braucht einen Namen. Mein Rasenroboter wird „Dewey“ heißen. Wem das kein Begriff sein sollte, Dewey ist der letzte überlebende Roboter der Valley Forge im Film „Lautlos im Weltraum“ (1972). Er wird mit der letzten Kuppel in den Weltraum abgestossen und pflegt die letzten Pflanzen der Erde. Endzeitstimmung, passt im Moment irgendwie zu meinem Rasen. Hier geht es zum Film.
 Für die Fahrmotoren habe ich jetzt Motorabdeckungen gefertigt. In den Abdeckungen sind vorn gleich die Spulen der Schleifensensoren integriert. ich weiss noch nicht, ob das so funktioniert, fand ich aber ganz cool. Mit Heißklebe ist das noch wasserdicht verpackt. Die Kabel für Motoren und Spule werden dann durch eine Bohrung in der Bodenplatte nach oben geführt.
Für die Fahrmotoren habe ich jetzt Motorabdeckungen gefertigt. In den Abdeckungen sind vorn gleich die Spulen der Schleifensensoren integriert. ich weiss noch nicht, ob das so funktioniert, fand ich aber ganz cool. Mit Heißklebe ist das noch wasserdicht verpackt. Die Kabel für Motoren und Spule werden dann durch eine Bohrung in der Bodenplatte nach oben geführt.
Rückschlag!
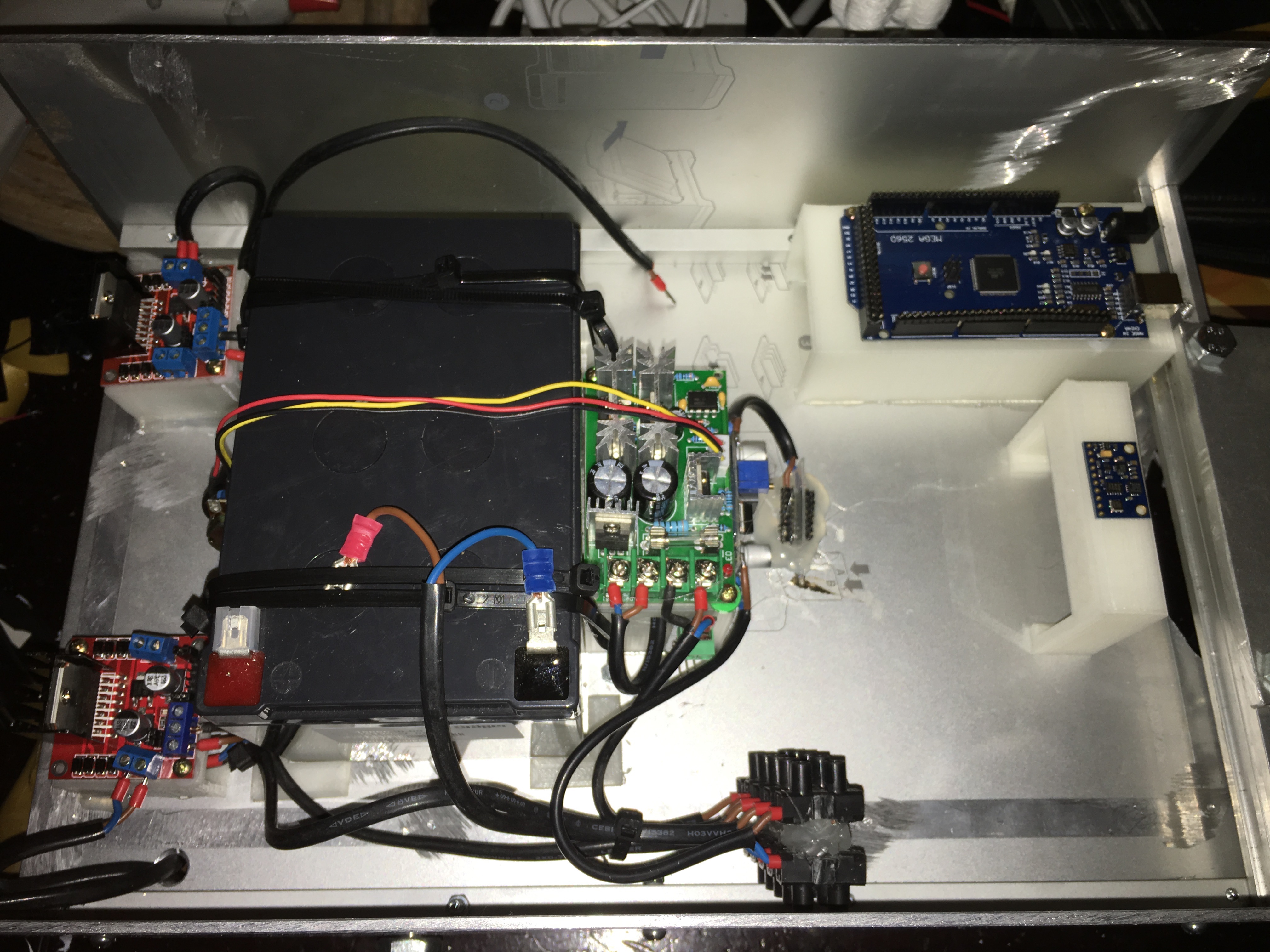 Beim abnehmen des Messerträgers ist mir die Motorwelle gebrochen. SUPER! Gibt es so etwas? Der Maxon Gleichstrommotor ist Geschichte. Ja die Schweizer, die können es halt. Den Motor hatte ich mit UHU Zwei Komponenten Kleber eingeklebt. Das überlebt den 3. Weltkrieg. Ich haben ihn einfach nicht wieder herausbekommen. Also habe ich die „Innereien“ entfernt. Das Gehäuse ist jetzt der Träger für einen HP-Druckermotor C9058-60071, der passt genau dort hinein. Durch dieses kleine Missgeschick ist das Mähwerk jetzt aber Höhenverstellbar. Es sind nur drei Zentimeter, aber immerhin. Die 12Volt-Leitungen sind alle verlegt, Mähmotor läuft und lässt sich mit dem Poti regeln. Fahrmotortreiber leuchten die LED´s. Als nächstes kommen die Datenleitungen und der erste Test.
Beim abnehmen des Messerträgers ist mir die Motorwelle gebrochen. SUPER! Gibt es so etwas? Der Maxon Gleichstrommotor ist Geschichte. Ja die Schweizer, die können es halt. Den Motor hatte ich mit UHU Zwei Komponenten Kleber eingeklebt. Das überlebt den 3. Weltkrieg. Ich haben ihn einfach nicht wieder herausbekommen. Also habe ich die „Innereien“ entfernt. Das Gehäuse ist jetzt der Träger für einen HP-Druckermotor C9058-60071, der passt genau dort hinein. Durch dieses kleine Missgeschick ist das Mähwerk jetzt aber Höhenverstellbar. Es sind nur drei Zentimeter, aber immerhin. Die 12Volt-Leitungen sind alle verlegt, Mähmotor läuft und lässt sich mit dem Poti regeln. Fahrmotortreiber leuchten die LED´s. Als nächstes kommen die Datenleitungen und der erste Test.
Gemäht hat er. Ich empfand es aber zu langsam.
Jetzt nach längerer Projektpause und Preisverfall der Mähroboter beim Aldi-Angebot zugeschlagen.
Ein Video dazu habe ich hier:
Und einen Erfahrungsbericht nach drei Monaten Mähbetrieb, hier: