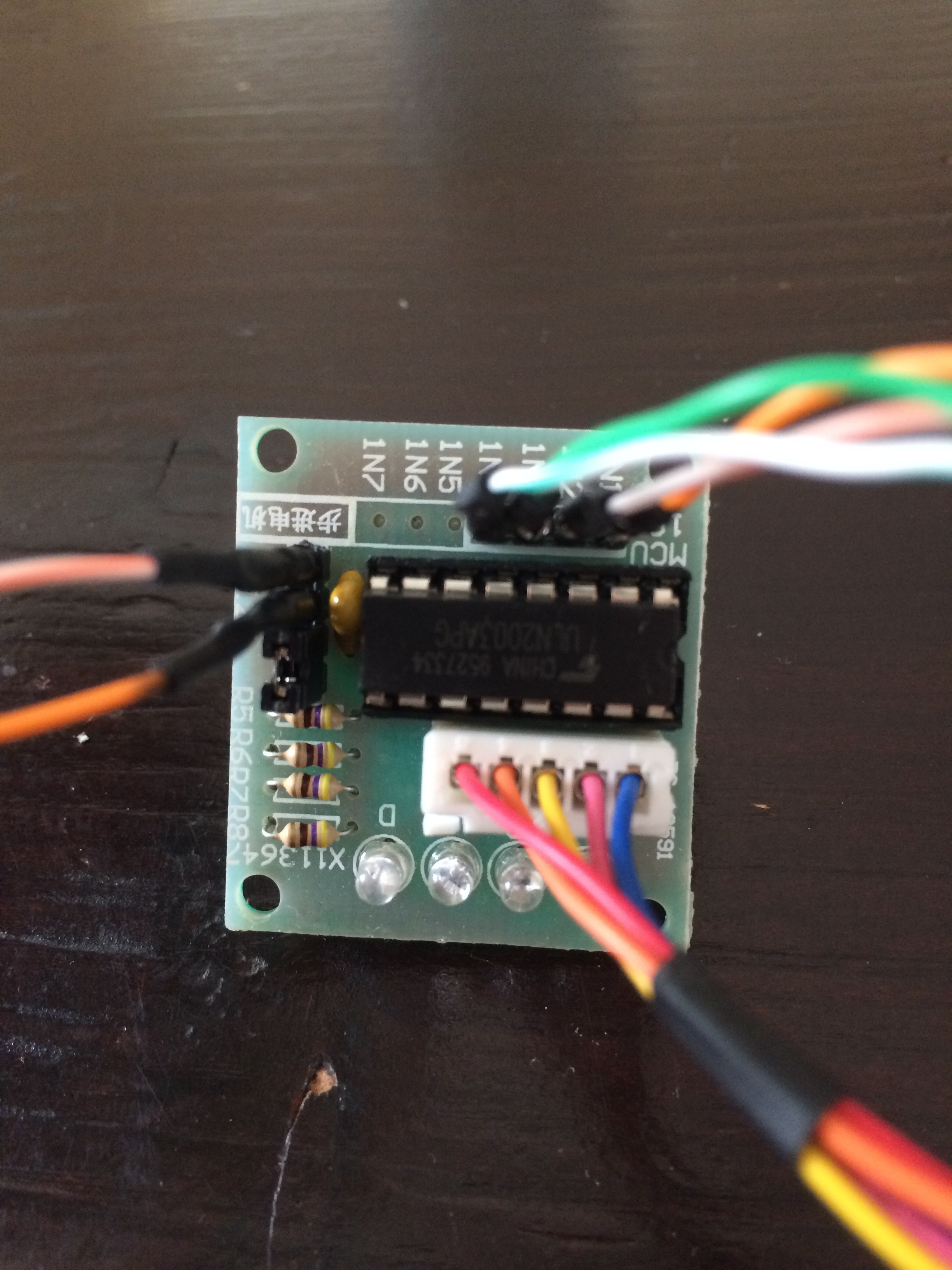
28BYJ-48 mit einem ULN2003A als Treiber.
Pythoncode für eine Umdrehung (Ich kann leider nicht für diesen Programmcode haften, du benutzt ihn auf deine eigene GEFAHR!):
from time import sleep
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BOARD)
A=12
B=16
C=18
D=22
time = 0.001
GPIO.setup(A,GPIO.OUT)
GPIO.setup(B,GPIO.OUT)
GPIO.setup(C,GPIO.OUT)
GPIO.setup(D,GPIO.OUT)
GPIO.output(A, False)
GPIO.output(B, False)
GPIO.output(C, False)
GPIO.output(D, False)
def Step1():
GPIO.output(D, True)
sleep (time)
GPIO.output(D, False)
def Step2():
GPIO.output(D, True)
GPIO.output(C, True)
sleep (time)
GPIO.output(D, False)
GPIO.output(C, False)
def Step3():
GPIO.output(C, True)
sleep (time)
GPIO.output(C, False)
def Step4():
GPIO.output(B, True)
GPIO.output(C, True)
sleep (time)
GPIO.output(B, False)
GPIO.output(C, False)
def Step5():
GPIO.output(B, True)
sleep (time)
GPIO.output(B, False)
def Step6():
GPIO.output(A, True)
GPIO.output(B, True)
sleep (time)
GPIO.output(A, False)
GPIO.output(B, False)
def Step7():
GPIO.output(A, True)
sleep (time)
GPIO.output(A, False)
def Step8():
GPIO.output(D, True)
GPIO.output(A, True)
sleep (time)
GPIO.output(D, False)
GPIO.output(A, False)
for i in range (512):
Step1()
Step2()
Step3()
Step4()
Step5()
Step6()
Step7()
Step8()
# print i
GPIO.cleanup()